Patent application named:
- --
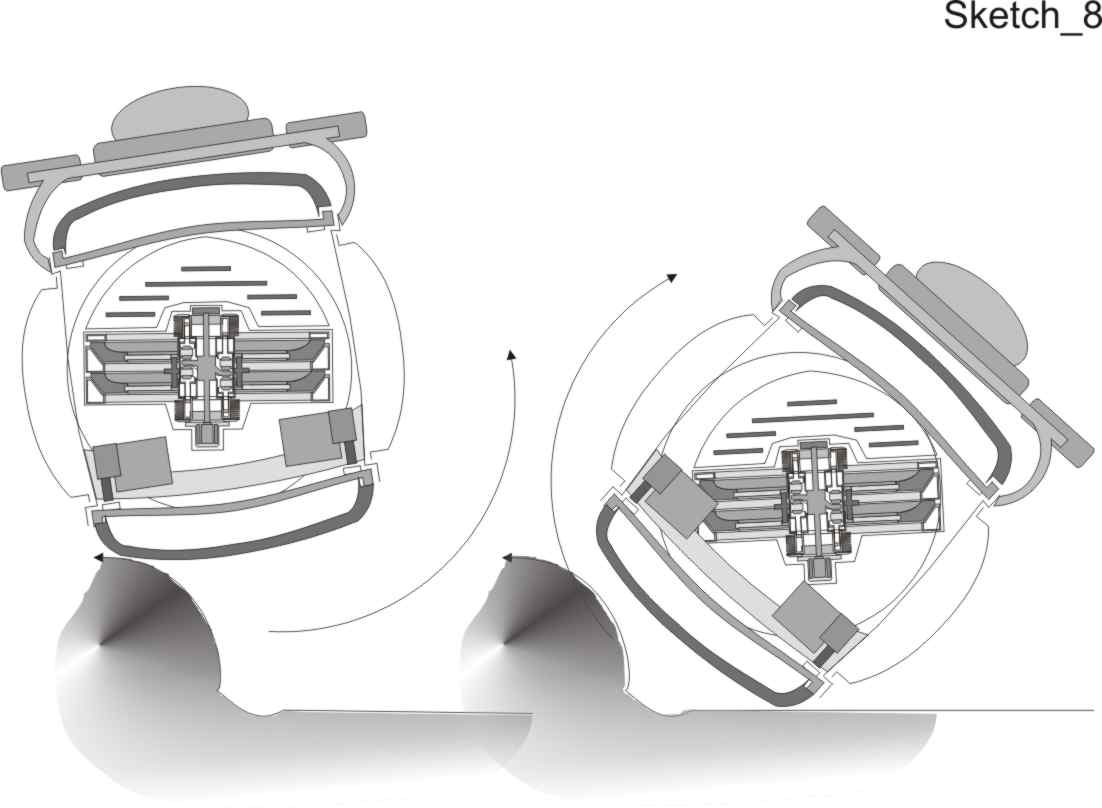
set of gyros;
- -- mechanism of synchronization and acceleration of gyros;
- -- power unit.
- -- mechanism of synchronization and acceleration of gyros;
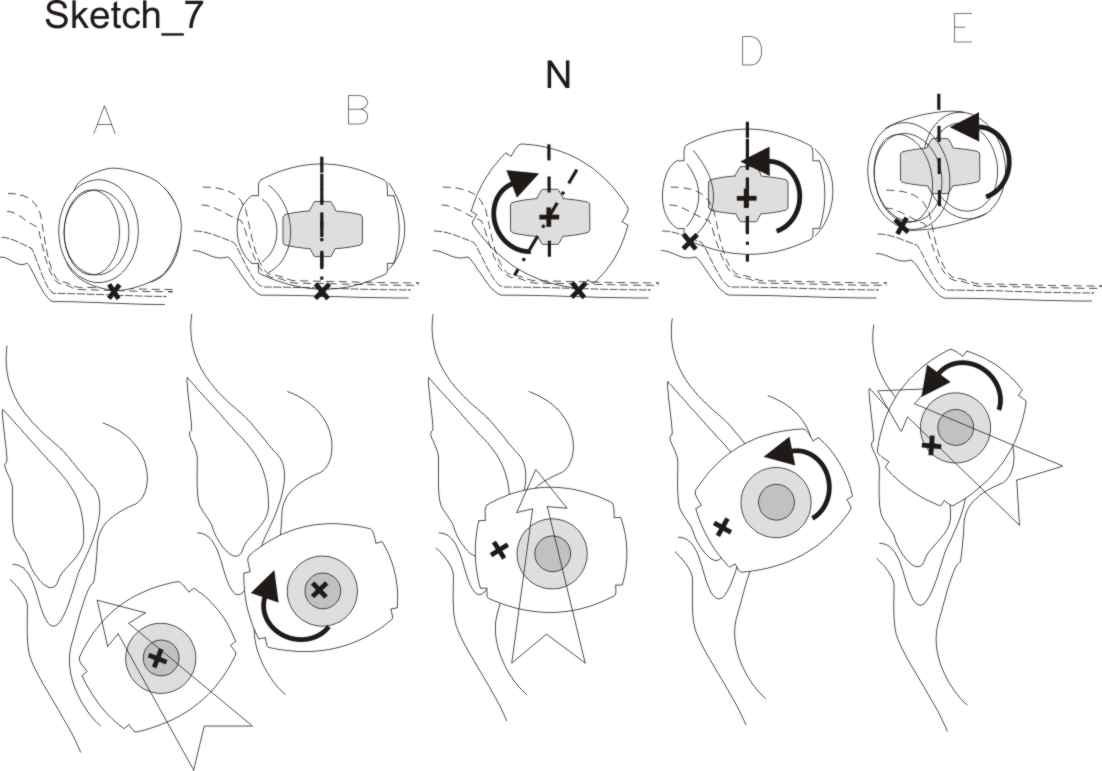
Two options of turn or their combinations are possible:
|
|
||
Two options of turn or their combinations are possible:
|