- --
Reduce the cost of the project four times and get a statistically reliable picture of the features of the Martian surface, its physical and chemical composition and climate;
- -- To reduce the cost of the project four times, the total weight of the lander and the research complex should be two times lower than have been planned for "curiosity";
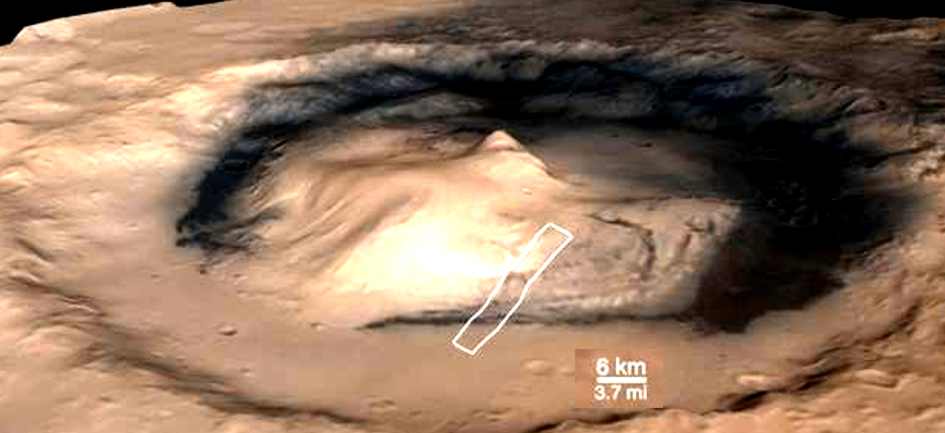
- -- To obtain statistically reliable picture of the features of the Martian surface, the total area of investigated surface must be at least 10 000 square kilometers.
- -- The entire volume of the research must be carried out during the Martian year;
- -- Reliability of a research complex must be enough to preserve not less than seventy percent of the original research ability and mobility to end of this period;
- -- Research complex should be able to transmit, in any combination, at least one hundred frames by specified resolution, including a stereoscopic or one hundred analytical measurements every ten kilometers of a route or do it during of four hours.
- -- To reduce the cost of the project four times, the total weight of the lander and the research complex should be two times lower than have been planned for "curiosity";
- --
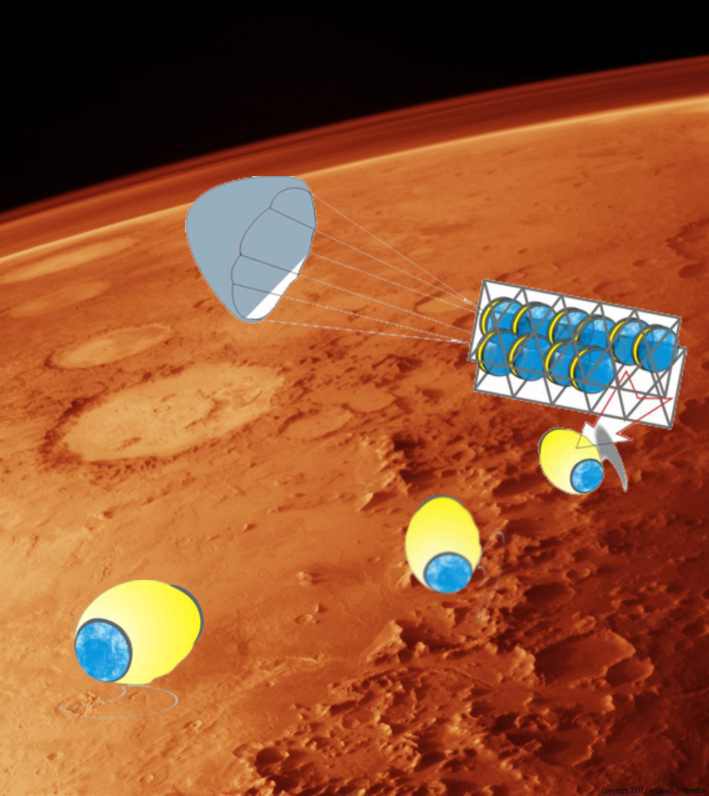
The method of research complex landing should not require that a speed of landing module in the Martian atmosphere will be dropped by means of the jet engine usage;
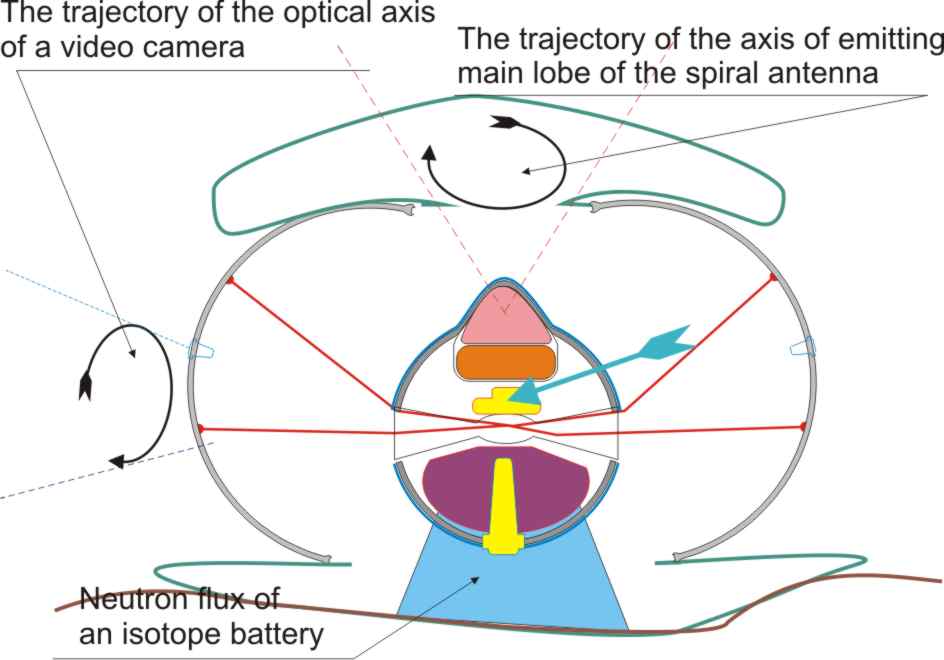
- -- The research units should be able to separating from the landing module at a height of at least 2-3 km and to reach the surface without damage by oneself;
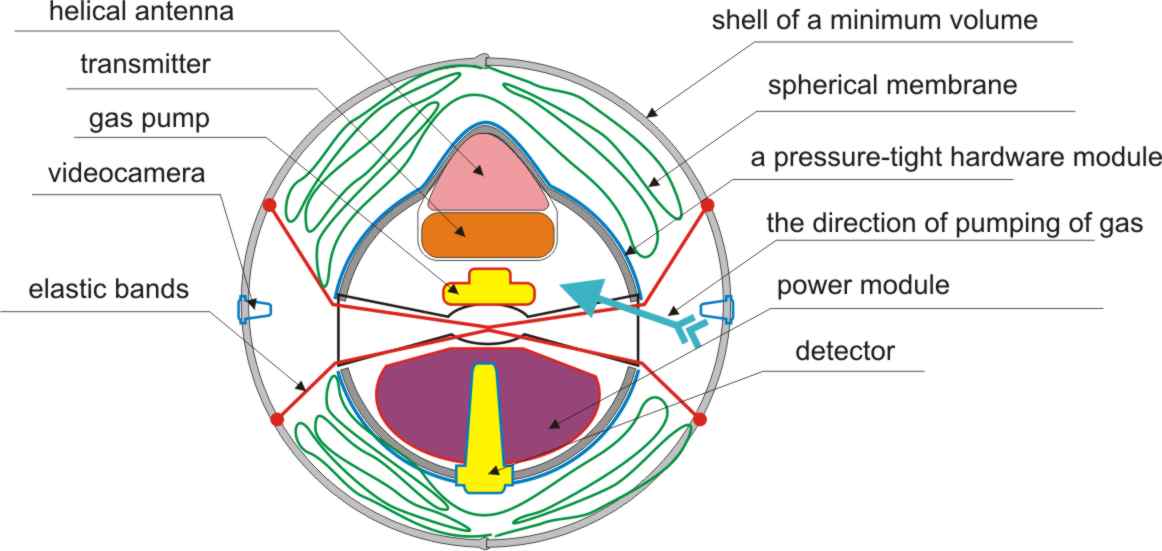
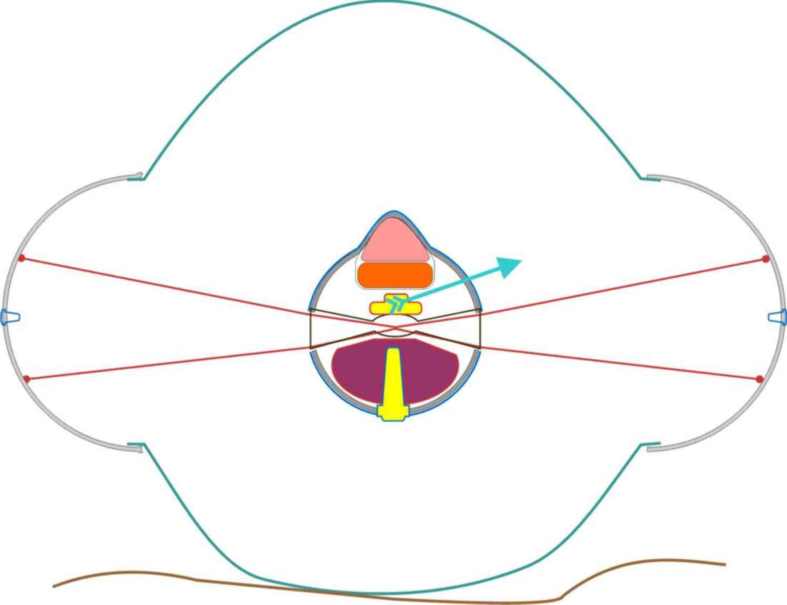
- -- Units should not have a complex mechanical devices which contact with the environment;
- -- Units should not be spending plenty of power from power supply for detectors operation;
- -- Units should not be spending plenty of power from power supply for their movement;
- -- Units moving should not depend on temperature and illumination on the planet surface.
- -- The research units should be able to separating from the landing module at a height of at least 2-3 km and to reach the surface without damage by oneself;