Материал кокона подбирается так, что бы после посадки он быстро разрушается под действием солнечной радиации.
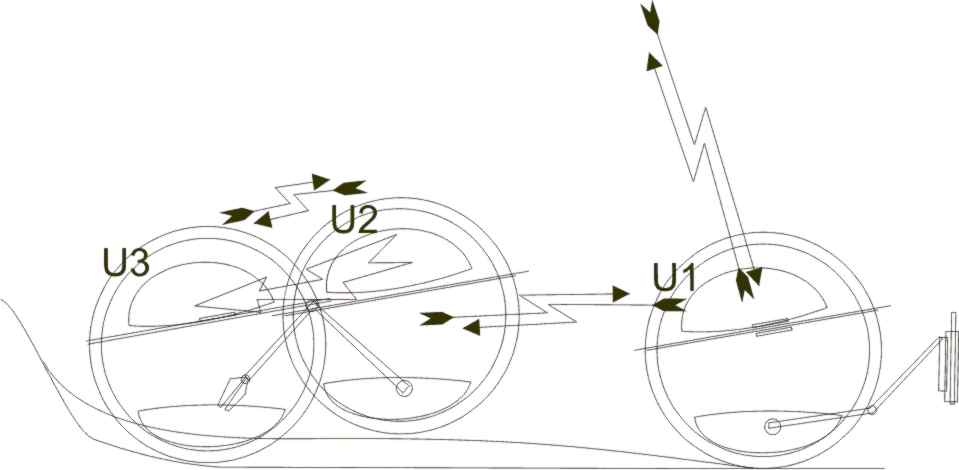
Особенности выполнения триадой рабочего задания.
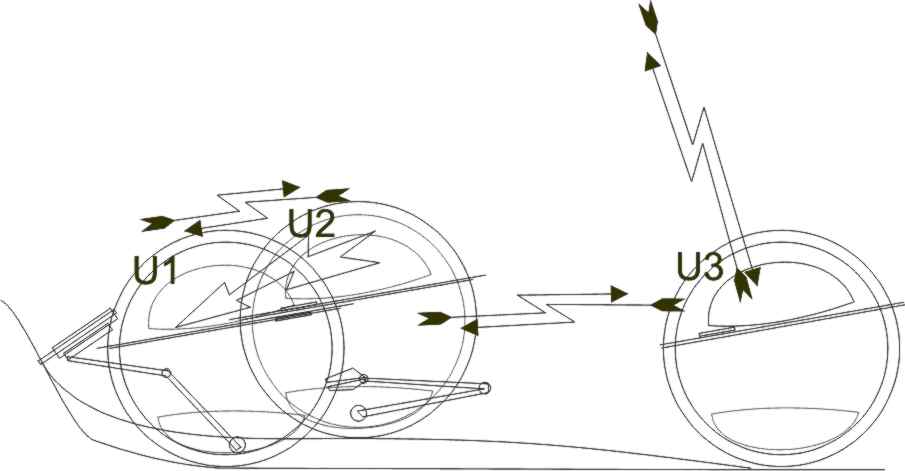
Пример выполнения рабочих функций триадой.
Модуль U1 - доминантной функцией является бурение
Модуль U2 -- доминантной функцией является работа манипулятора
Модуль U3 -- доминантной функцией является экспресс анализ
Модуль U2 обеспечивает энергетическую поддержку операции, выполняемой модулем U1, и служит для него дополнительной механической опорой.
Модуль U3 обеспечивает им обмен информацией мощным радиосигналом с командным центром
Модуль U1 выполняет энергетическую поддержку U2 и служит для него дополнительной механической опорой
Модуль U3 обеспечивает им обмен информацией мощным радиосигналом с командным центром
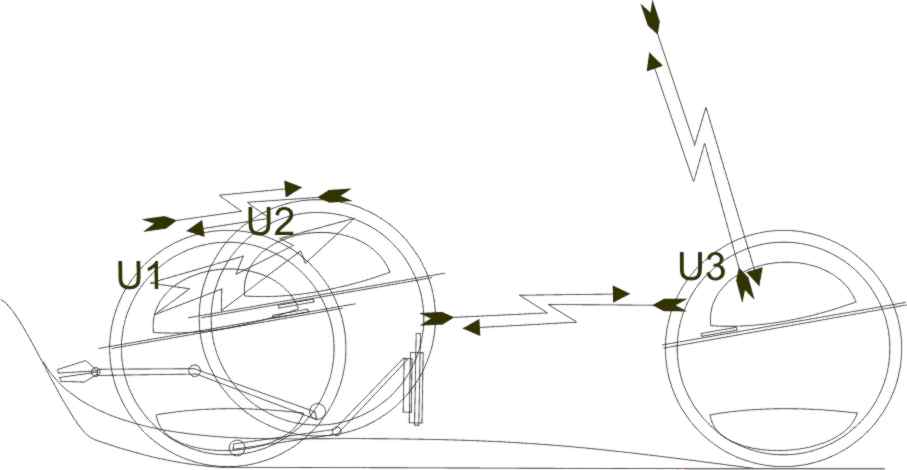
Модуль U2 выполняет энергетическую поддержку U3 и служит для него дополнительной механической опорой
Модуль U1 обеспечивает им обмен информацией мощным радиосигналом с командным центром