The designing of such composite robots is one of tasks within the bounds of development of generic concept for the autonomous, remote-controlled complex intended for research of the Moon.
Conceptual design was carried out in 2000-2002 by the initiative of the author.
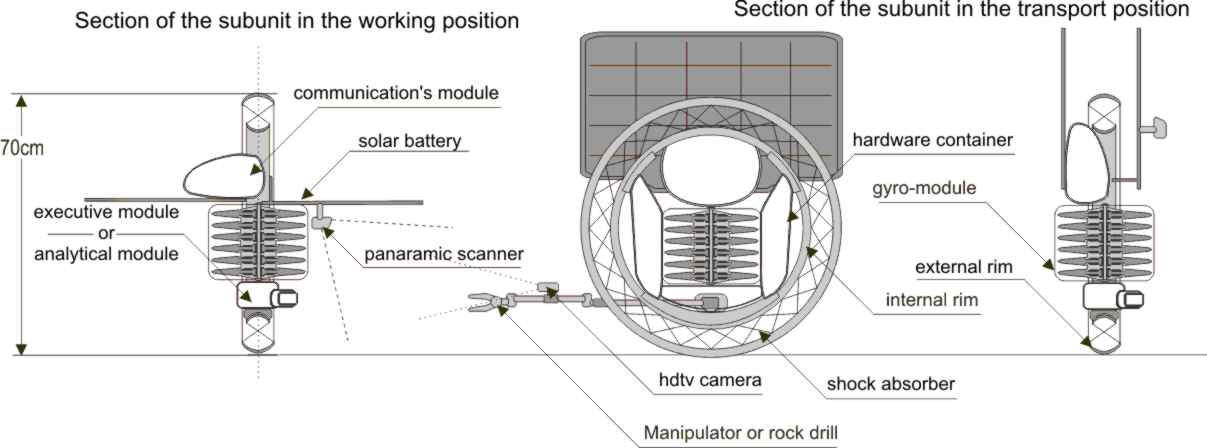
The exploratory robot consists of three self-propelled subunits that is united by common purpose and acting as one device.
Above or below, such group of the subunits is named triads.
Each of the subunits has one unique, dominating function and duplicates other functions of each other.
Depending on the function that is dominant in the time of task executing, the robots carry out redistribute the auxiliary functions inwardly the triads and they can change its own mutual position inside triads.
All subunits/robots of the triads are designed as unified modules.
The subunits inwardly triad differ from each other by type of an executive or an analytical equipment.
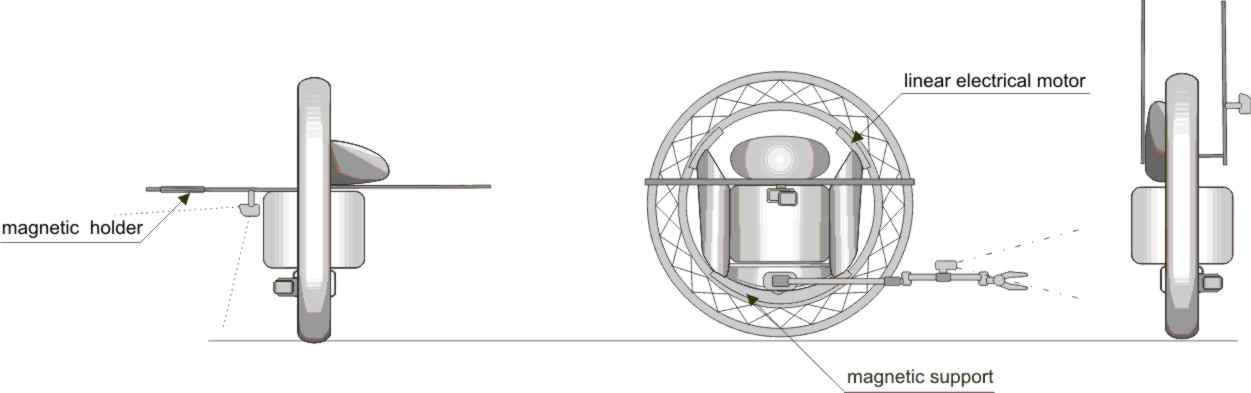
All bearings of gears of those robots are working by means of usage a magnetic support and don't have any friction parts.
All executive hinge-joints are working by means of the metal having a thermal memorizing of forms.
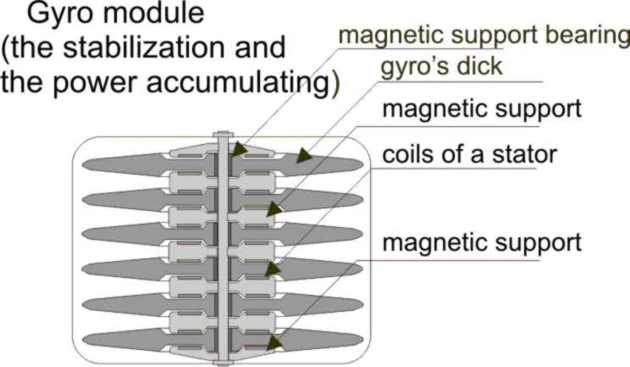
Each of the robots has a gyro-module that is working simultaneously as of the spatial stabilizer, the controller of direction and as the accumulator of energy.
All most important functions are duplicated inwardly triad.
The robots can carry out energy supply each to other by means of magnetic holders which unite two or more of subunits if, during executing of task, it is required to raise a precision of positioning or to give additional power for one of subunits.
A possible mass of such subunit is within 8 - 10 Kg.
Its possible speed of motion is 3 - 5 km/h.
For single triads, a conjectural time of working capacity (ability to execute not less 70% of the declared functions) is from 8 to 11 months.
If a few triads are used simultaneous, resultant working capacity can be increased by means of exchange units between triads.
The project that uses three triads which are working as one research complex is most efficient and can perform all complex of research work on area of 10 000 sq km. during 6 months.
Assume that we have:
The exploratory robot that consists of three self-propelled subunits which are united by common purpose and which are working as united complex;
Each of the subunits has one unique, dominant function and duplicates other functions of each other;
Depending on the function that is dominant in the time of task executing, the robots carry out redistribute the auxiliary functions inwardly the triads and they can change its own mutual position inside triads.
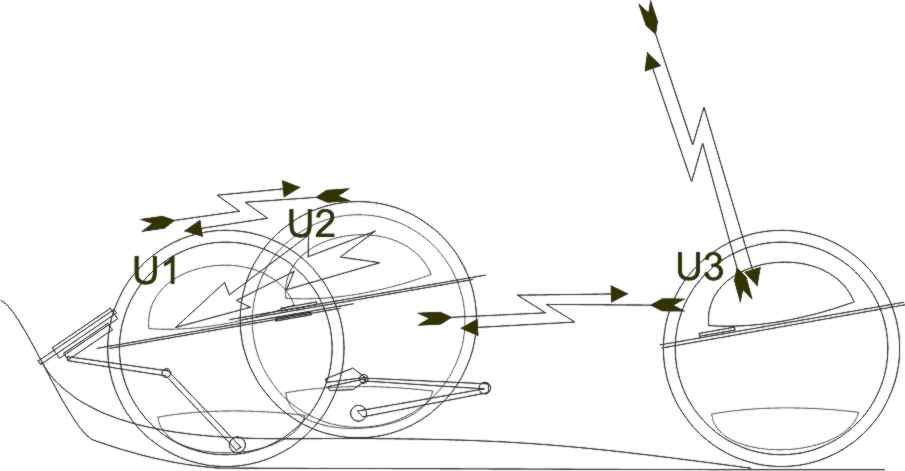
For example, the triad consist of:
U1 - the dominant function is "rock-drilling".
U2 - the dominant function is "usage of manipulator".
U3 - the dominant function is "express analysis".
Current task is to investigate the geological formation
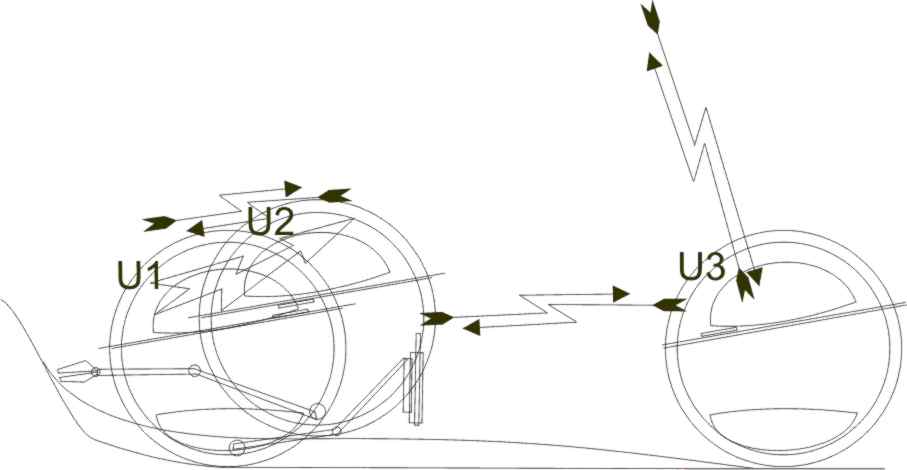
Stage 1
U1 is dominant (dominant function is drilling).
During execution of first stage of task, triad carries out drilling of rock.
U2 carries out the energy supply support to U1 and, simultaneously, it works as a mechanical support and as knot of hardware network.
U3 carries out transmitting of information at an orbital transmitter.
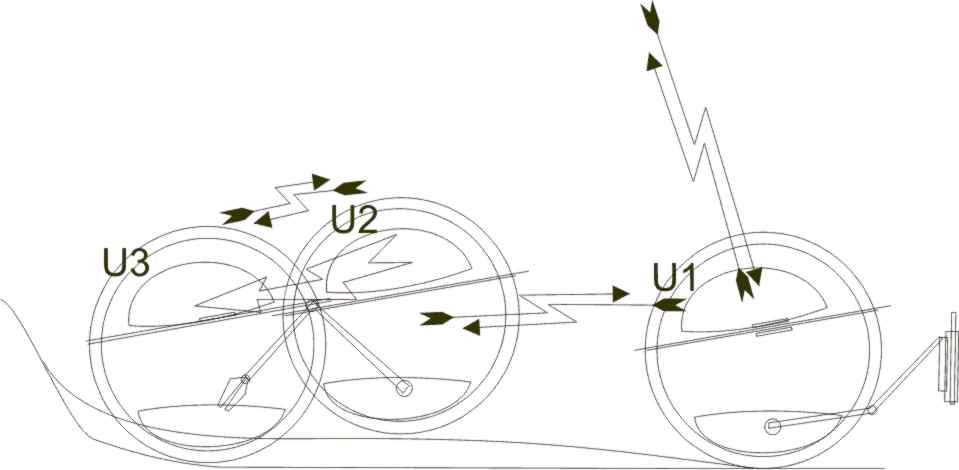
Stage 2
U2 is dominant (dominant equipment is a manipulator)
During execution of second stage of task, triad carries out taking of specimen from the drill.
U1 carries out the energetic supply support to U2 and, simultaneously, it works as a mechanical support and as knot of hardware network.
U3 carries out transmitting of information at an orbital transmitter.
Stage 3
U3 is dominant (dominant function is express analysis)
During execution of third stage of task, triad carries out express analysis of mined specimen.
U2 carries out the energetic supply support to U3, transfers the specimen into U3 and, simultaneously, it works as a mechanical support and as knot of hardware network.
U1 carries out transmitting of information at an orbital transmitter.