Примеры использования патента.
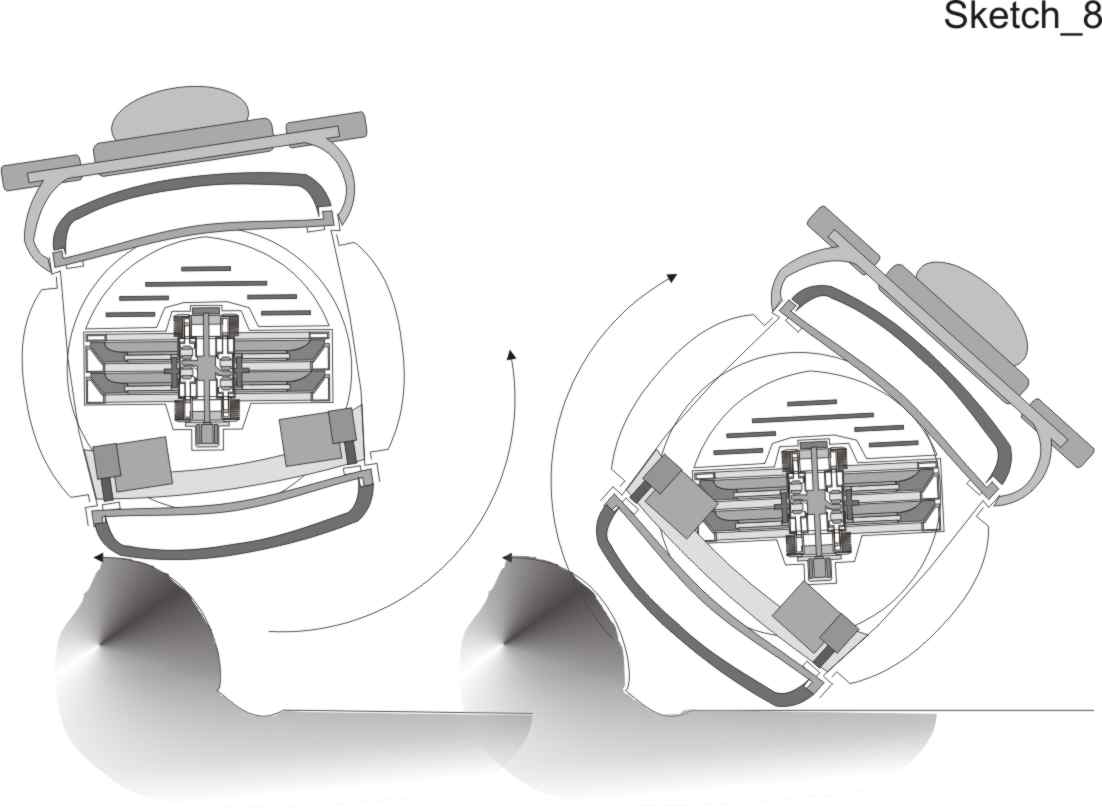
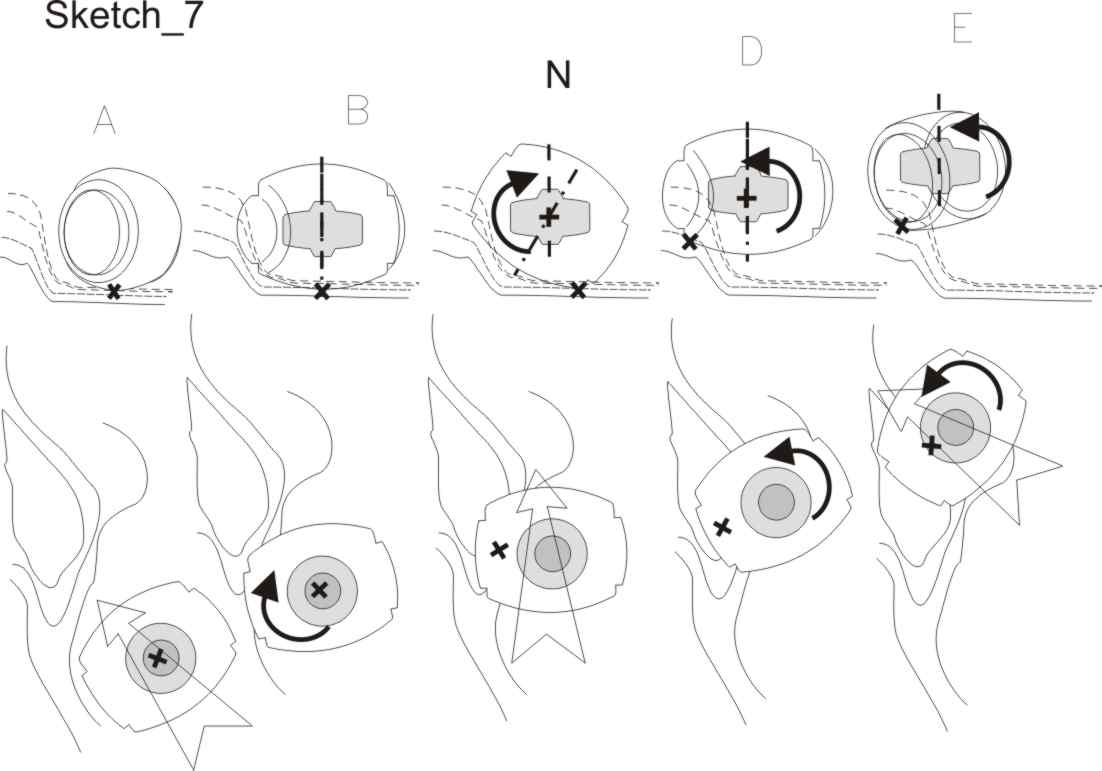
Приложение 1(sketch_7) - Способ прохождения припятствий устройством, спроектированным с использованием выше описанных ипринципов.
|
|
||
Примеры использования патента.
Приложение 1(sketch_7) - Способ прохождения припятствий устройством, спроектированным с использованием выше описанных ипринципов.
|