A brief description of the project, which is contained in Part Two
Each robot of this complex is designed to perform one dominant and several auxiliary functions.
These individual robots have the ability to join in a variable system.
Within this system, they have the opportunity to reallocate resources and functions which are necessary to carry out the task.
Usage of the composite robots that can change own configuration for performance of the research tasks on Moon surface gives an opportunity to conduct research on a large area by the gradually increasing complexity of program.
It is ensured by delivery of new component or by interchanging between independent systems individual components which are needed to perform specific tasks.
This action becomes possible when the research complex consists of the separate units working as united system.
The robots of the variety complexes are interchangeable to ensure the implementation of new tasks or for maintaining the performance of the complex when functionality partial loss.
Each of such robots that intended for the research complex is a simple and inexpensive device having high reliability but its exploitation makes sense only if its delivery is much cheaper than delivery of a manned space module, or a landing platform with a heavy, multi-function, research device.
It is very important that the landing platform is been cheap and primitive part of the interplanetary probe and only this platform should be landed on Moon but the main part of the transport module will be to remain on the circular orbit performing a variety of current and future task.
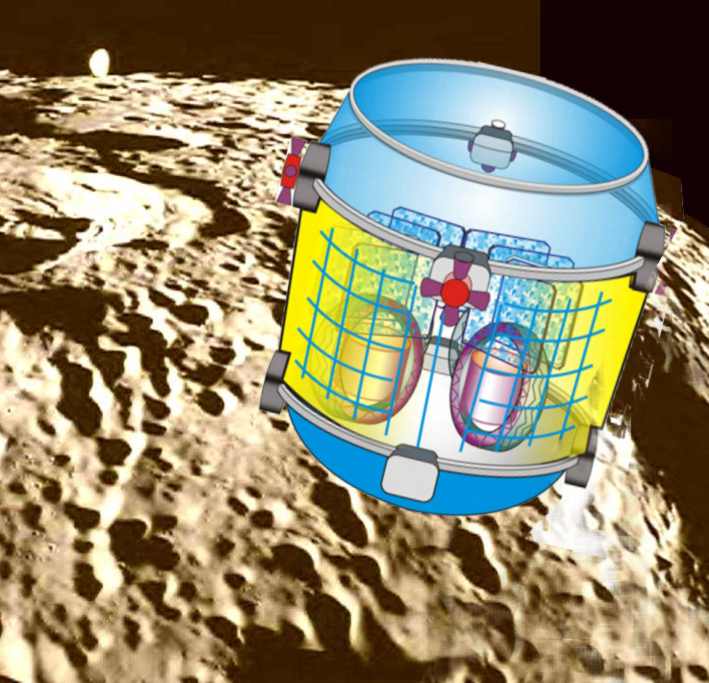
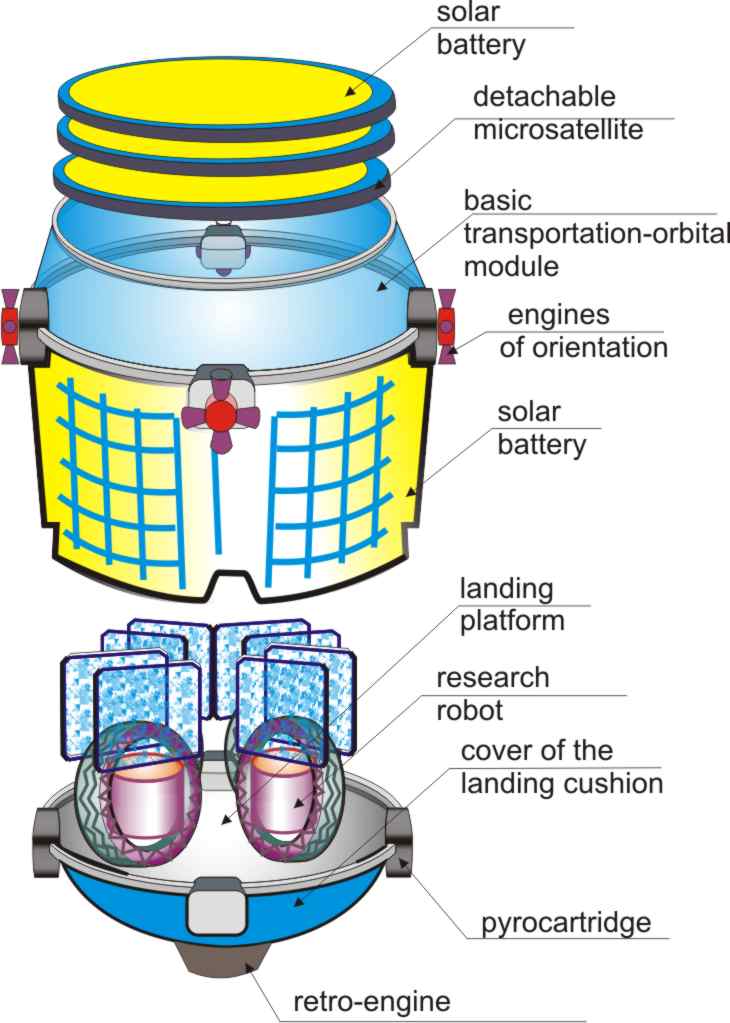
The transport module consists of two main parts - the landing platform and orbiter that include a few micro-satellites which have to be separated from the device onto a circular orbit.
The landing can be performed by means of usage a cheap landing platform if will be used construction features of the composite robots which are located on this platform.
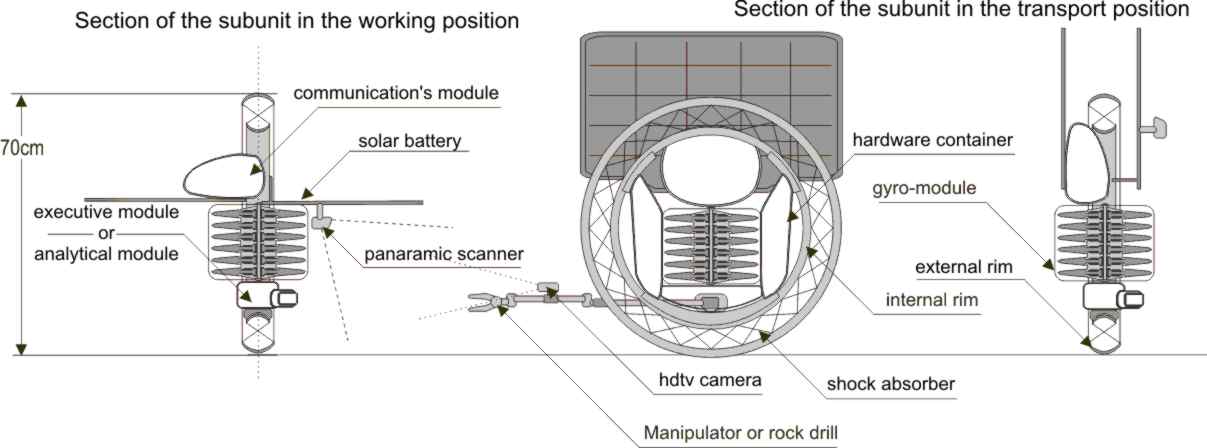
Such the robots have a gyro-module that is located in the center of its mono wheel and is capable to stabilize whole the landing module in space after its own spinup and, in addition, the robots can use its computers for control of the landing complex.
The landing platform on which four basic robots are located don't has its own system of stabilization and control.
It consists of a mounting pad that has: the retro-engine; a few pyrocartridges of positioning and a unit that forms a multi-layer gas cushion for landing.
The composite robots are installed on the landing platform by means of glue that can be disintegrated under the action of ultraviolet light and heat.
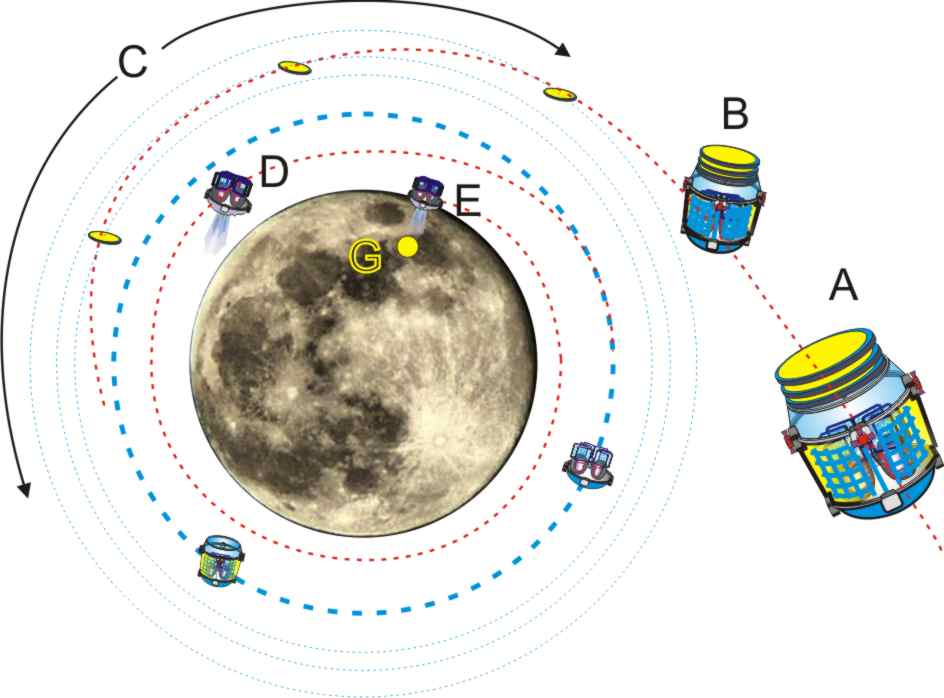
The whole procedure of an injection of the orbital module into a circular orbit and descent of the landing platform to the point of research can be considered as several independent stages.
Stage A - B
During this stage, the module goes into an elliptical orbit and carries out the spatial orientation so that its axis would be oriented as parallel of the vertical line into the point of landing.
After executing of the spatial orientation, the spinup is performed for all gyro-stabilizers that located in the orbital module and in the robots as well as for gyro-stabilizers of the micro satellites.
As result of that, all components of the transport module have to memorize and lock its orientation in space.
Stage С
Using the orientation engines, the transport module passes into a circular orbit at an altitude of approximately 20km with the circular velocity of about 1.7km/s.
In the process of attainment of a circular orbit, the transport module releases a few micro-satellites.
These micro-satellites, either will take a few orbits with different angular velocities in passive mode or will be occupy the general orbit if they have its own low-power ion engines.
During mission, they will be carrying out retransmission of the signal from the robots to the orbital module.
These micro-satellites may perform any additional functions.
For example, a tracking of gravitational fluctuations or parameters of the surrounding space.
Stage D
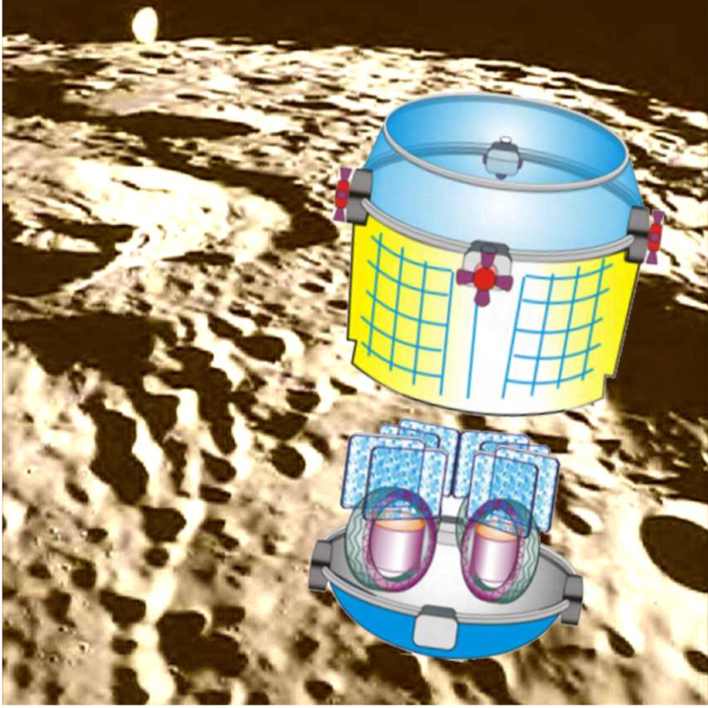
The orbital module and the landing platform have parted and the orbital module moving away from the landing platform under action of the orientation engines.
Stage D - E
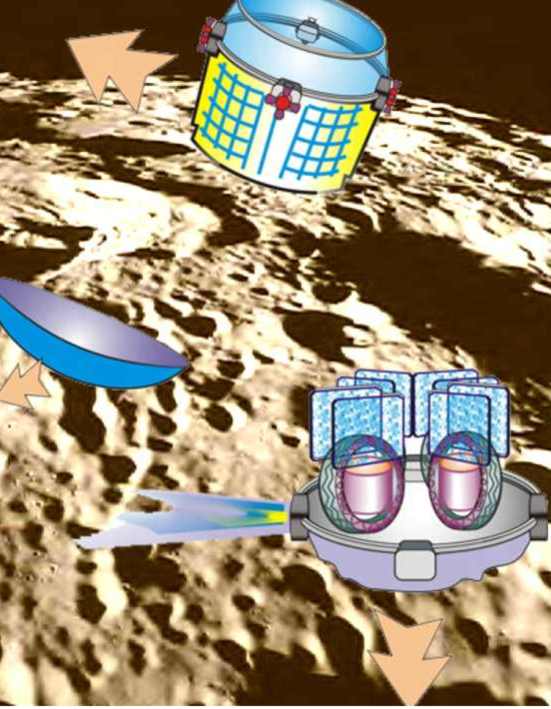
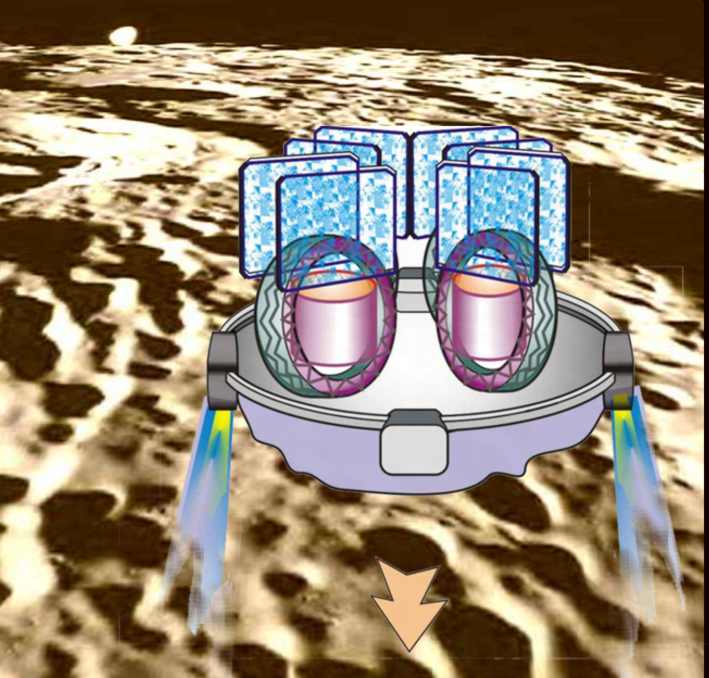
The landing platform rejects a protective case that protects the retro- engine and the landing cushion and then walks away by means of a short pulse of pyrocartridge.
At the same time, the retro-engine starts its own spinup that to be prepared to working.
Each time when the landing platform is in the point lying as parallel to the vertical to the point G the retro- engine produces one or more pulses which slow down the orbital velocity and carry out changing of trajectory of the landing platform at descent trajectory.
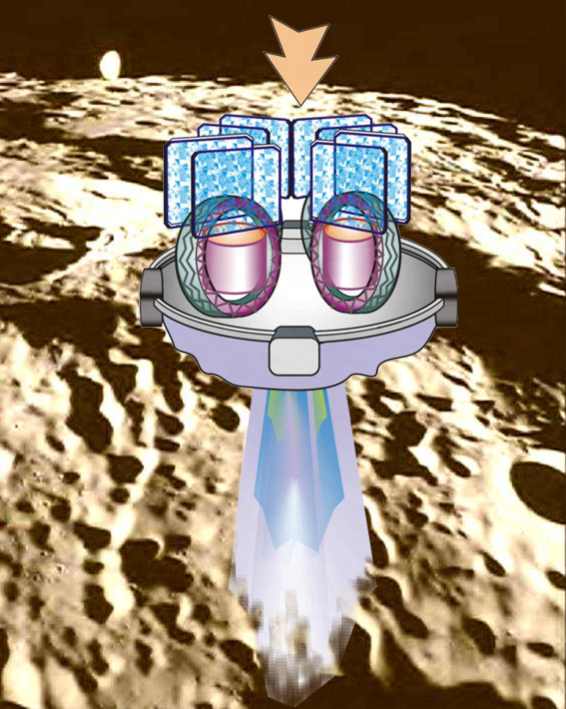
The retro-engine have to slow down vertical and horizontal components of the velocity of descent rate approximate up to "0" , at an altitude of several kilometers above of the landing point and then it detaches from the landing platform.
As mentioned above, the gyro-modules of the composite robots are carrying out stabilization of the landing platform to vertically relative to the pre-selected landing point.
The landing platform stabilizes itself over the landing point by means of usage of pulses of the pyrocartridges and, if it is necessary, further reduces the landing speed.
The method used to complete the landing, don't requires advances of zero horizontal and vertical velocities in the moment of contact with surface.
It will be quite acceptable for completion of the landing, if horizontal speed will be not more than 100 km/h and vertical speed will be not more than 150 km/h.
In the lunar condition having free-fall acceleration that equals to 1.6 meters per second squared, such speed is easily achieved without usage of flexible control of the retro-engine and of the pyrocartridges.
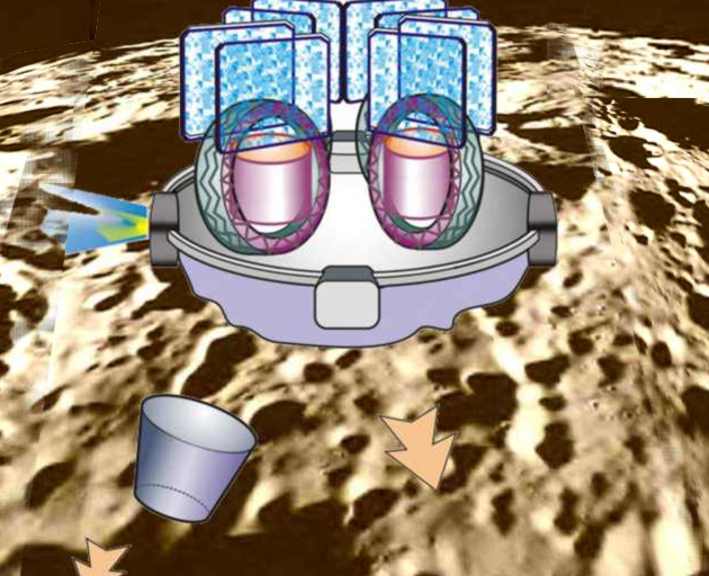
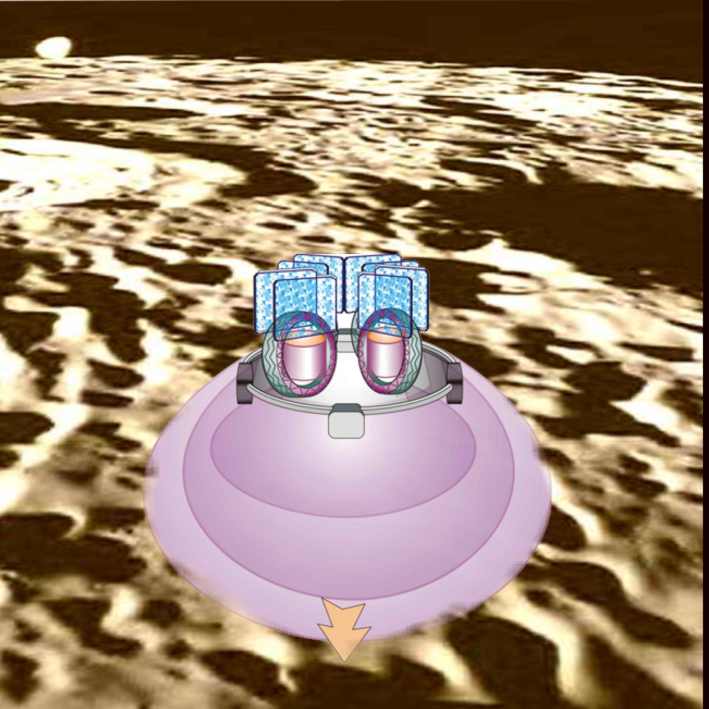
Completion of the landing is performed by means of usage an inflatable landing cushion.
Inflation of the landing cushion, depending on the vertical velocity and terrain, is carried out at an altitude from several tens to hundreds meters.
The landing cushion is designed as a multi-layered, coaxial air bag in which each of his following parts has lower pressure with respect to internal.
The lower surfaces of each its coaxial element have windows with reduced durability, which begin to break down during contact with moon surface.
After contact with the surface, the multi-layer skirt that be produced under the landing platform compensates the vectors of velocity.
This skirt goes beyond of the projection of the landing platform at its diameter and is protecting it from damage by obstacles
This landing gear absorbs the horizontal velocity both due to its friction at the surface and as result of collision of the inflate parts with the landscape elements.
Simultaneously, it dampens the vertical component due of the gradual leakage of working gas through the damages of the multi-layer bags.
After completing the landing, those parts of the landing cushion, which were not destroyed, will be to disintegrate within few hours or few days under the influence of temperature and of ultraviolet radiation.
At the same time, influence of such aggressive environment carries out destruction of the substance that fastens the composite robots in the surface of the landing platform.
After destruction of this substance the Research Complex ready for use and can leave the landing platform.
Transmission of signals off the composite robots to Earth is going both through the orbital module and through the intermediate transponders of microsatellites.