НАЗЕМНО-КОСМИЧЕСКАЯ СЪЕМКА МЕСТНОСТИ
- -- Общее понятие о системах спутниковой навигации "GPS"
215®15'00" + 120®(i -1), (1)
2. Принципы определения координат точек местности с использованием "СРS"
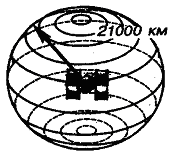
Рис. 1. Определение области местоположения точки по одному навигационному спутнику Земли
3. Измерение расстояний до навигационных спутников "GPS"
Рис. 4. Псевдослучайный код
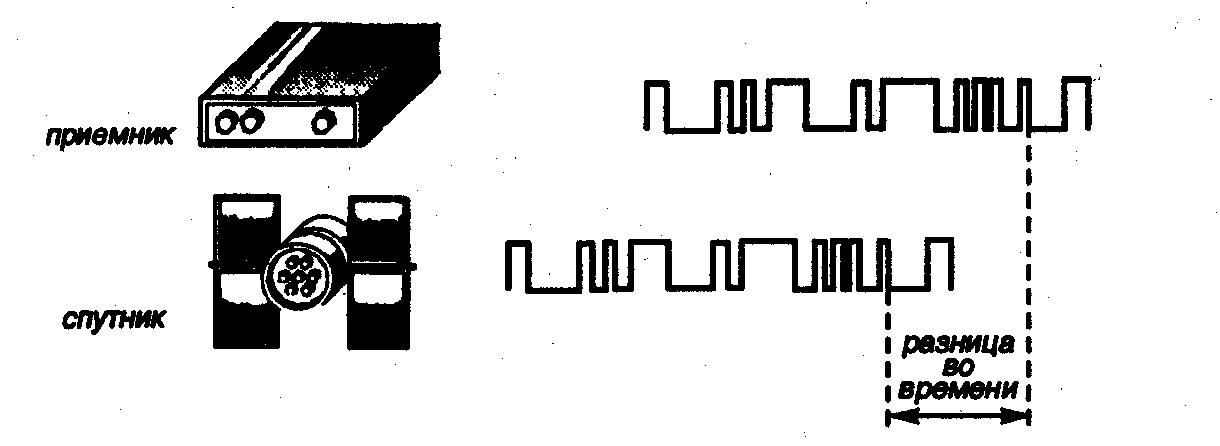
Рис. 5. Определение времени распространения радиосигнала по сдвижке псевдослучайных кодов
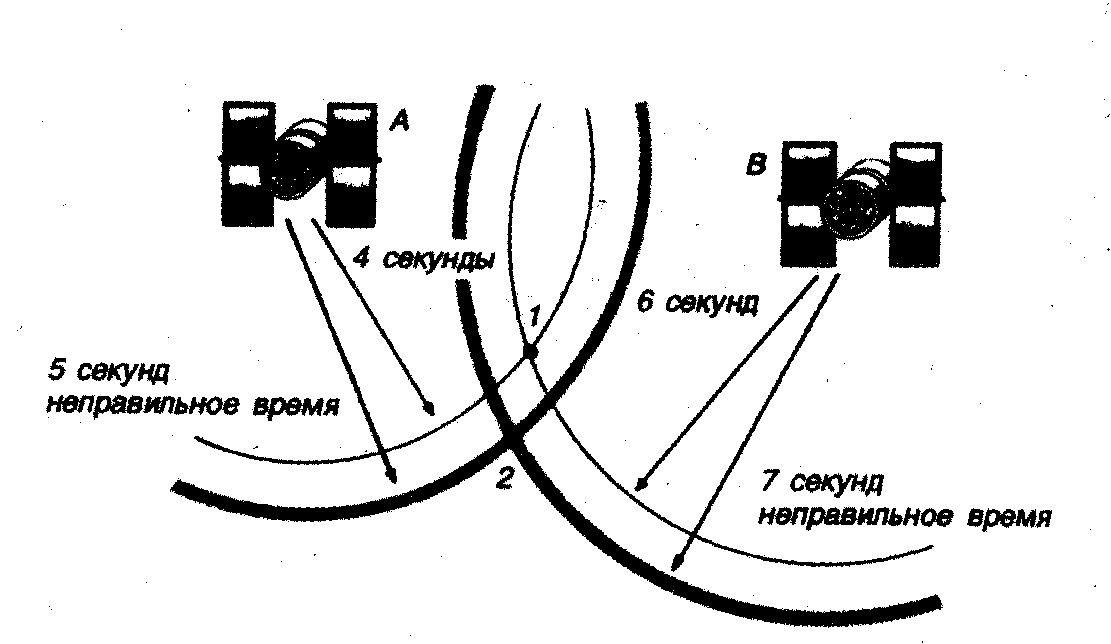
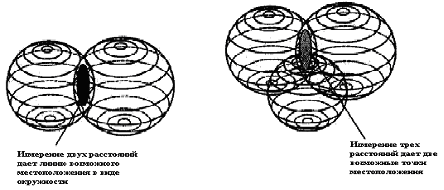
Рис. 6. Определение местоположения точки на плоскости по 2-м измерениям:
1 - по 2-м точным измерениям; 2 - ошибочное определение местоположения точки
по 2-м неточным измерениям
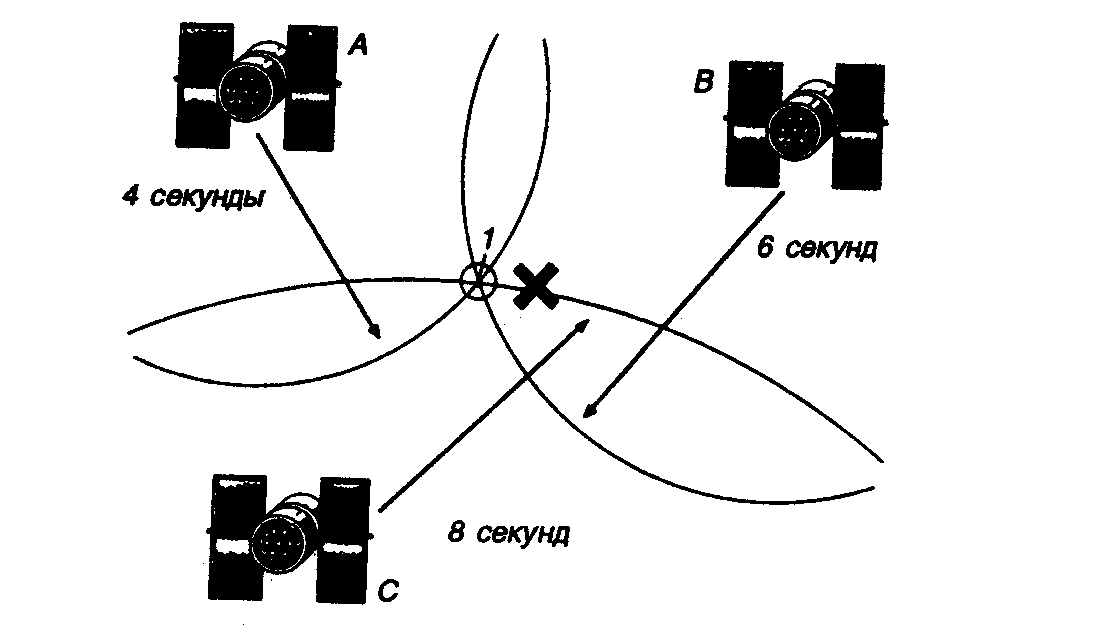
Рис. 7. Определение местоположения точки 1 на плоскости по 3-м точным измерениям
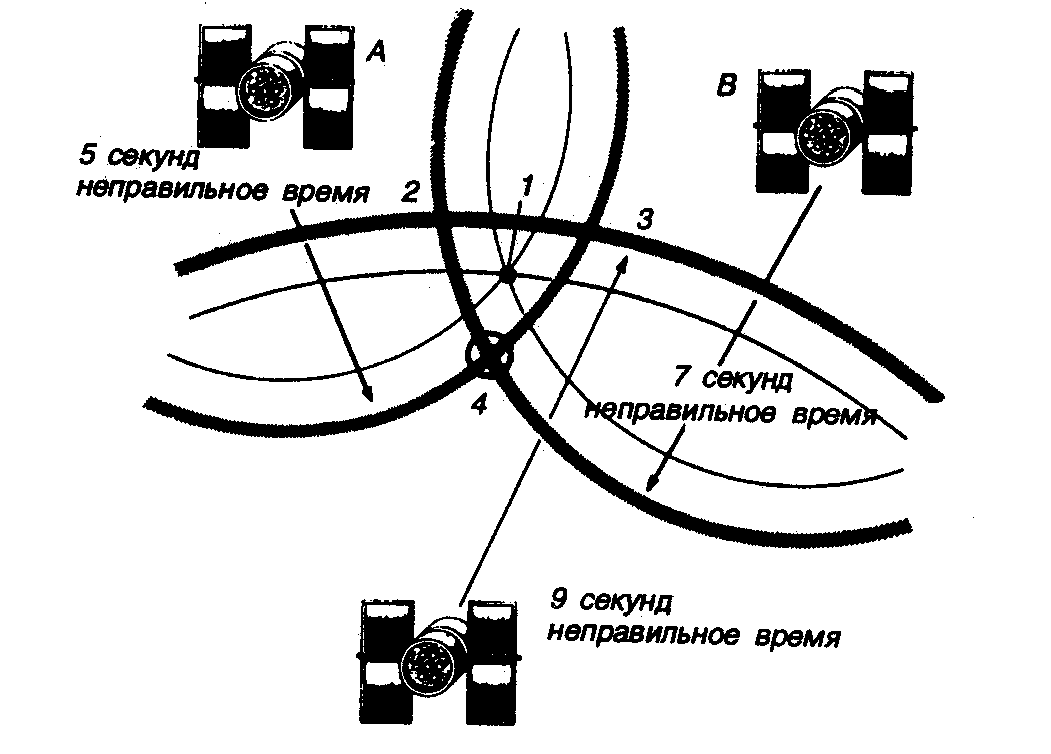
Рис. 8. Определение местоположения точки на плоскости по 3-м неточным измерениям:
1 - точное местоположение точки; 2,3,4 - варианты ошибочного определения местоположения
4. Приемники "GPS"
Рис. 9. Одночастотный 12-канальный GPS - приемник навигационного класса точности "Eagle Explorer"
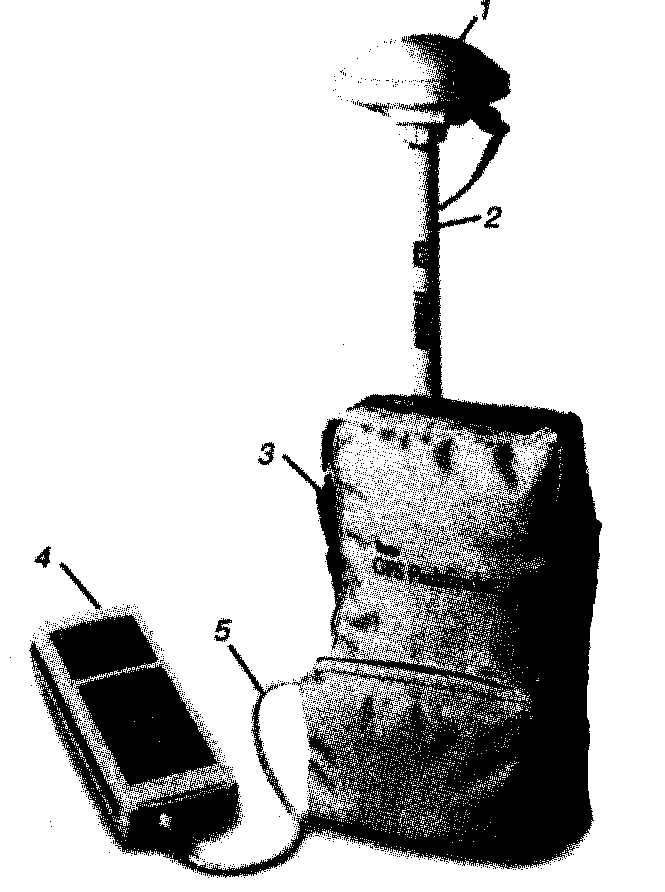
Рис. 10. Одночастотный 12-канальный GPS - приемник навигационного класса точности картографии и ГИС "Pathfinder ProXL":
1 - компактная антенна с обтекателем; 2 - полуметровая сборная стойка; 3 - сумка для переноса системы; 4 - накопитель TDC1; 5 - кабель загрузки данных
5. Организация геодезических работ с использованием базовых станций "DGPS"
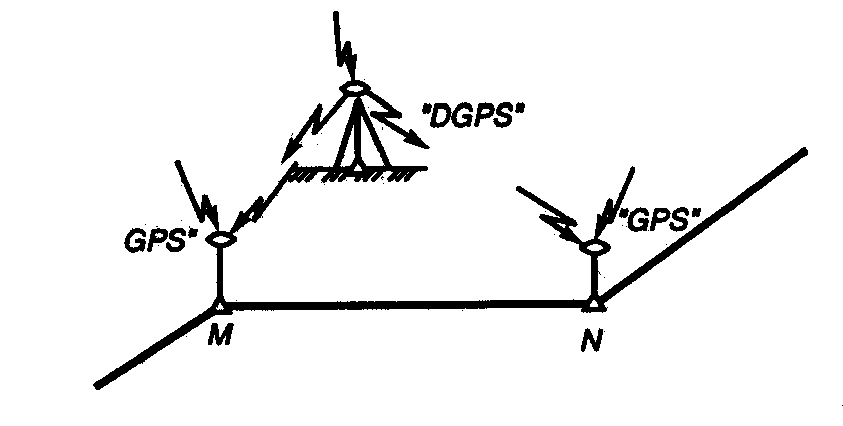
Рис. 11. Схема геодезических измерений с использованием базовой станции "DGPS"
6. Наземно-космическая топографическая съемка местности
7. Использование gps-технологий при изысканиях автомобильных дорог
8. Использование GPS-технологий при строительстве автомобильных дорог