![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
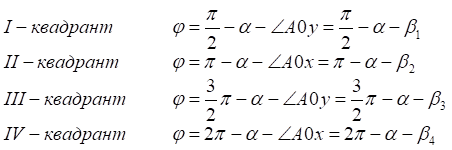
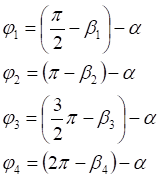
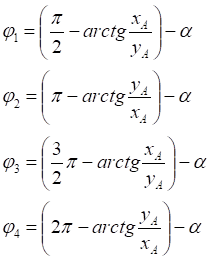

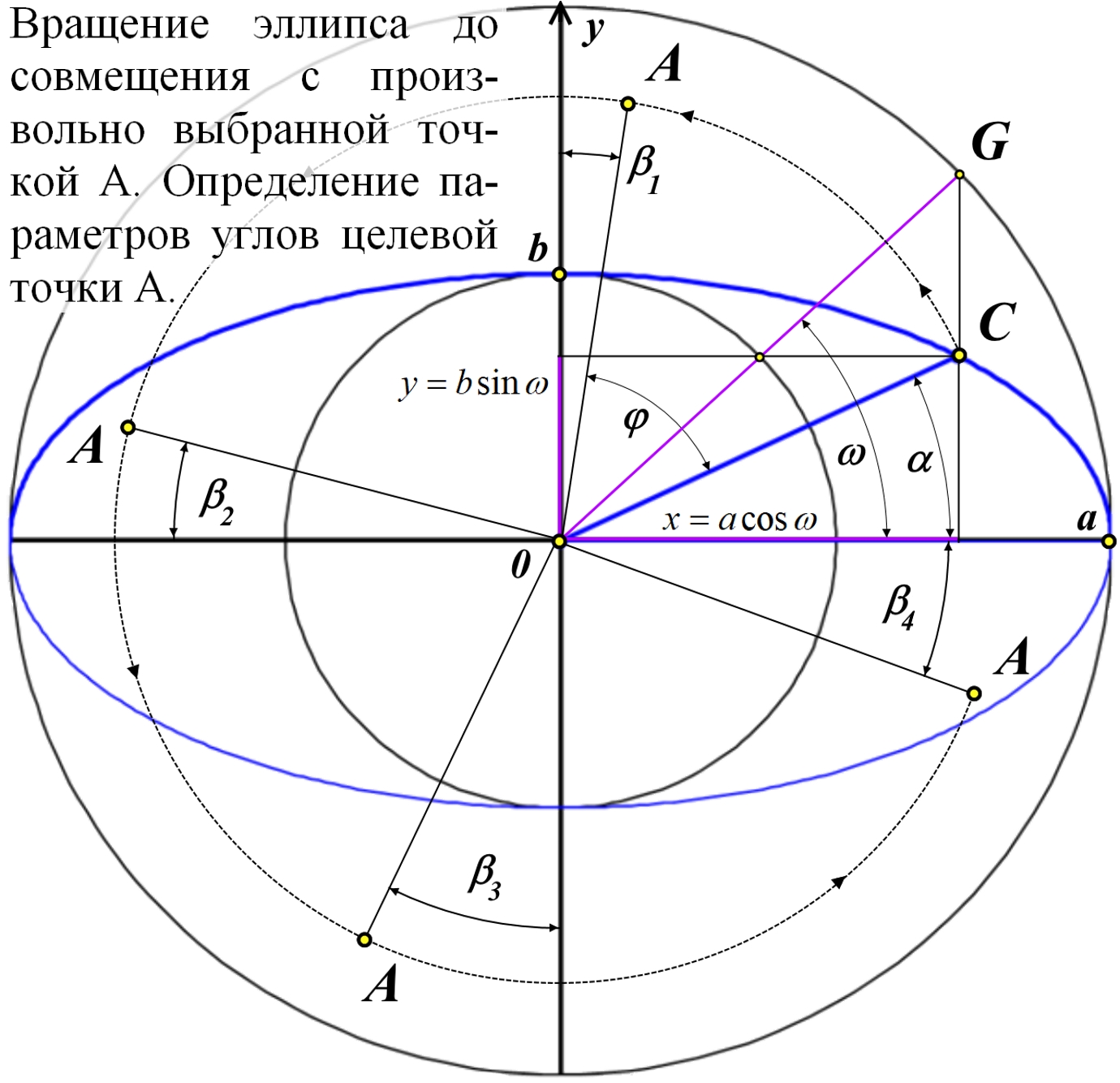
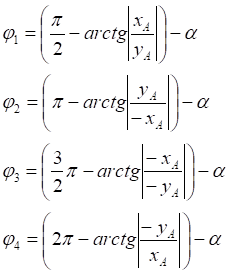
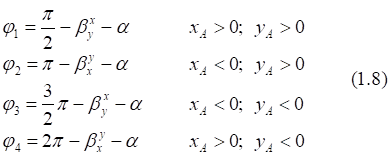
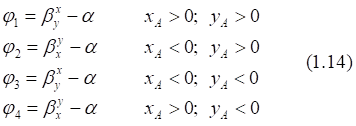
1. x > 0, y > 0
2. x < 0, y > 0
3. x < 0, y < 0
4. x > 0, y < 0
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
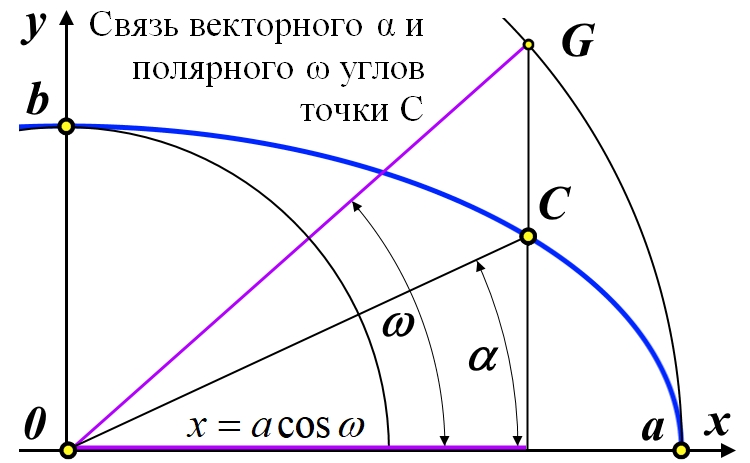
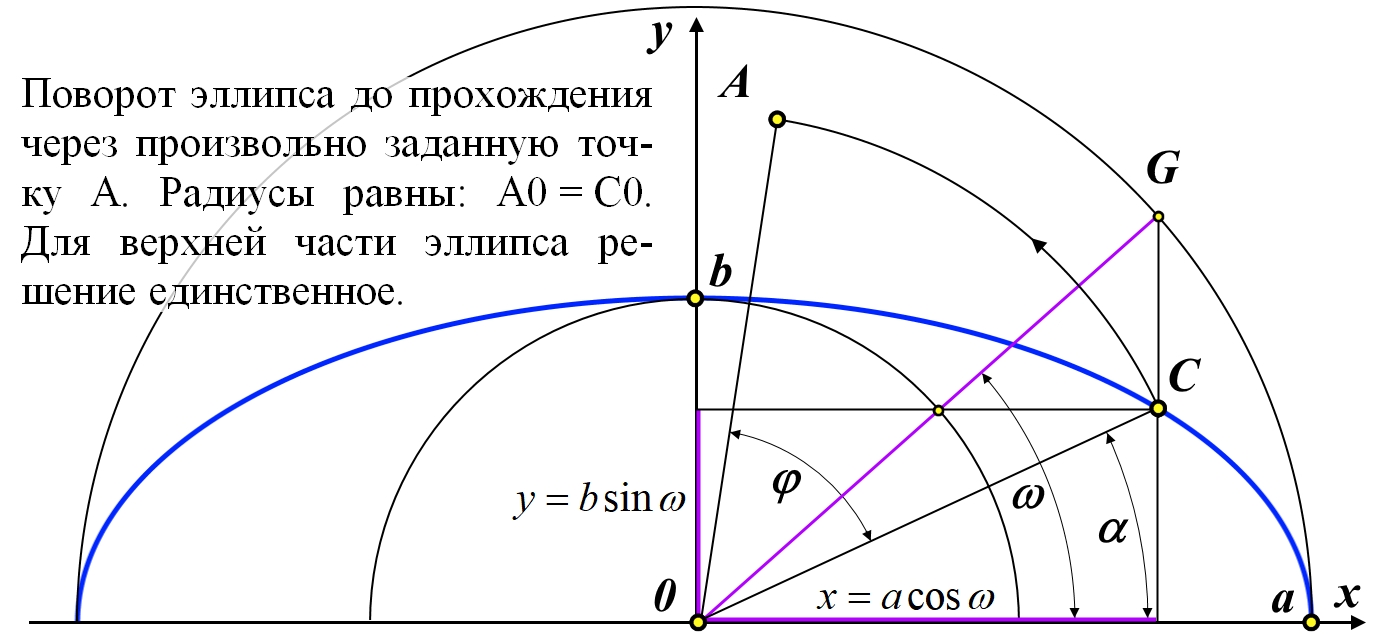
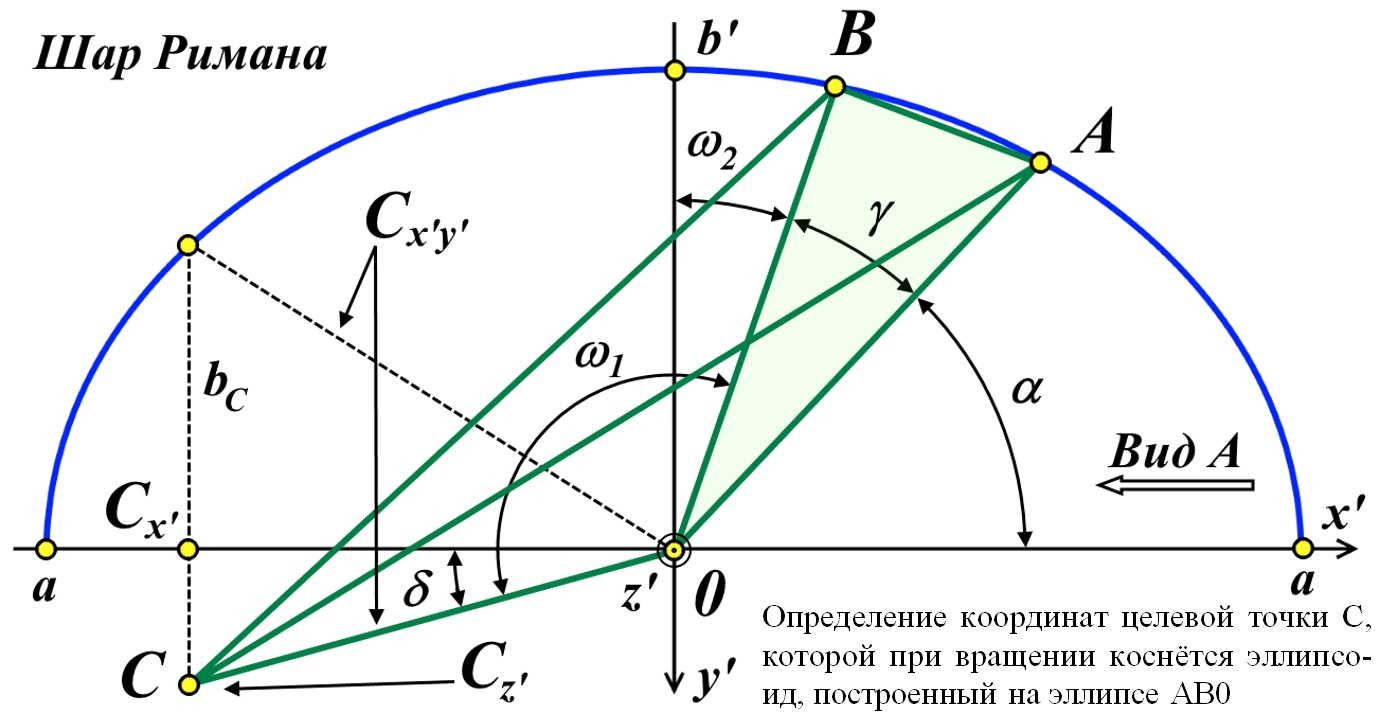
Рис.2.8. Связь векторного α и полярного ω углов точки C
![]()
![]()
![]()
![]()
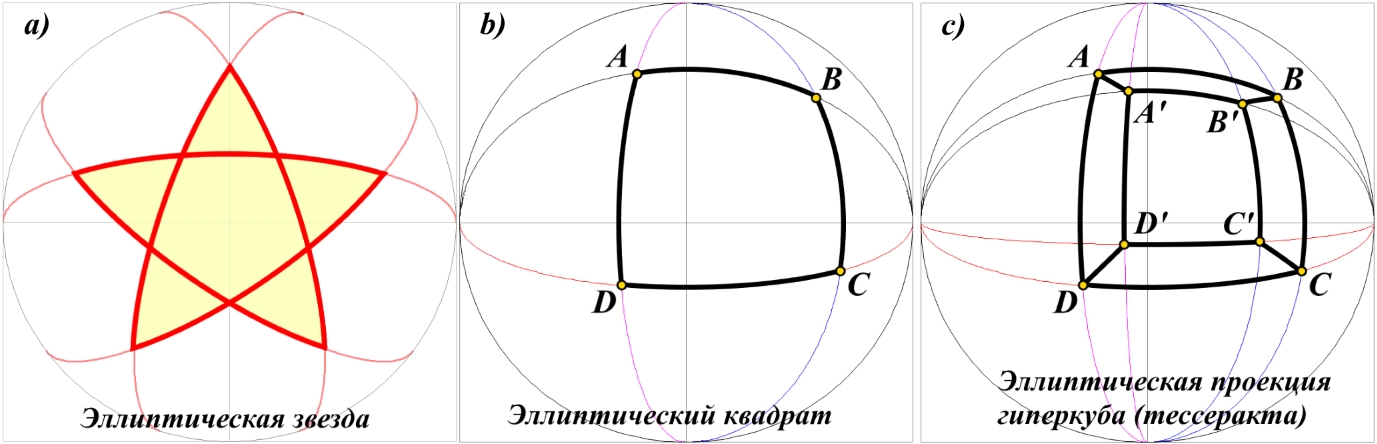
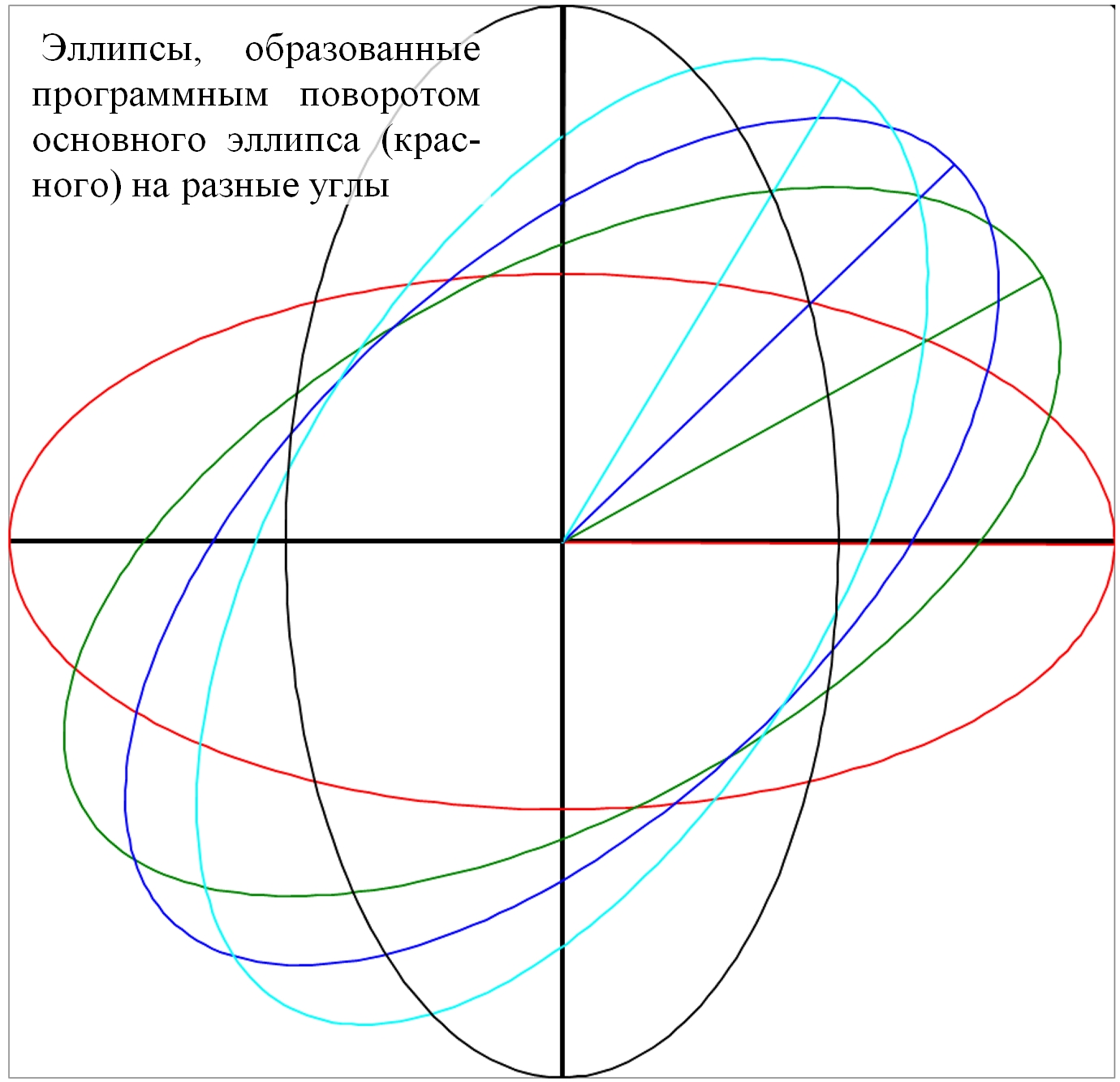
Рис.3.2. Эллиптические фигуры на диске Римана
![]()
![]()
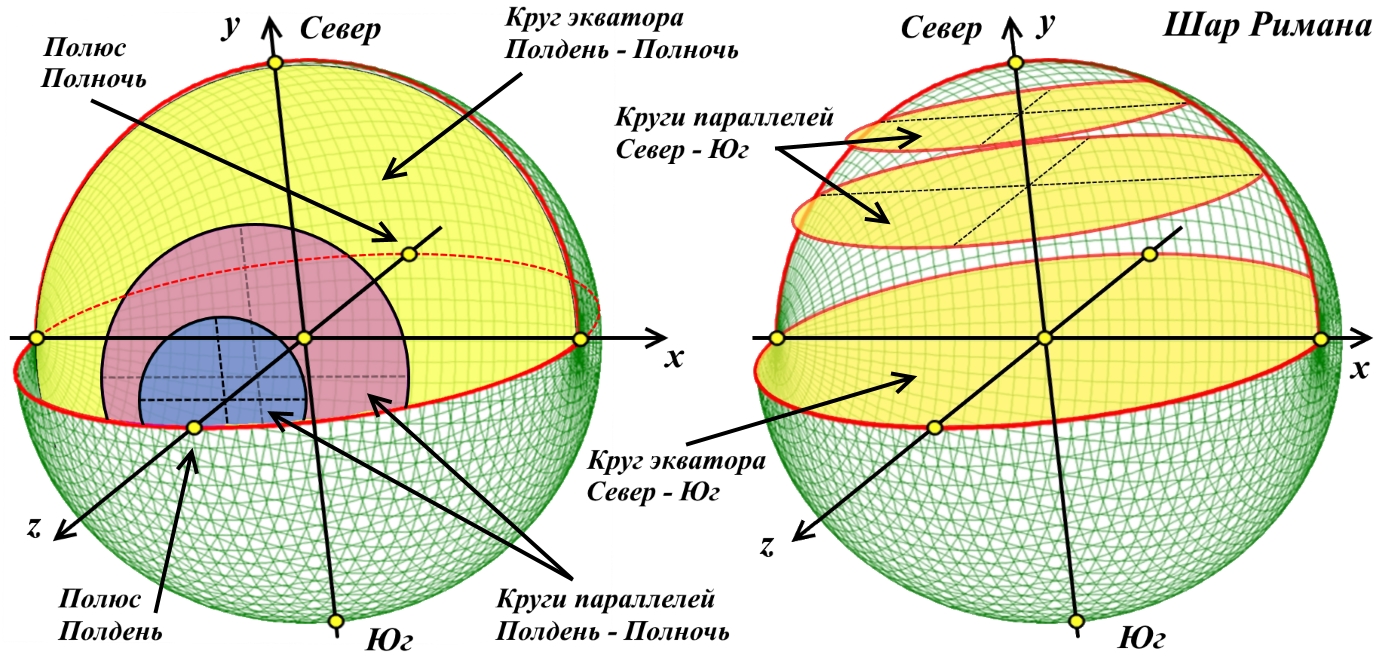
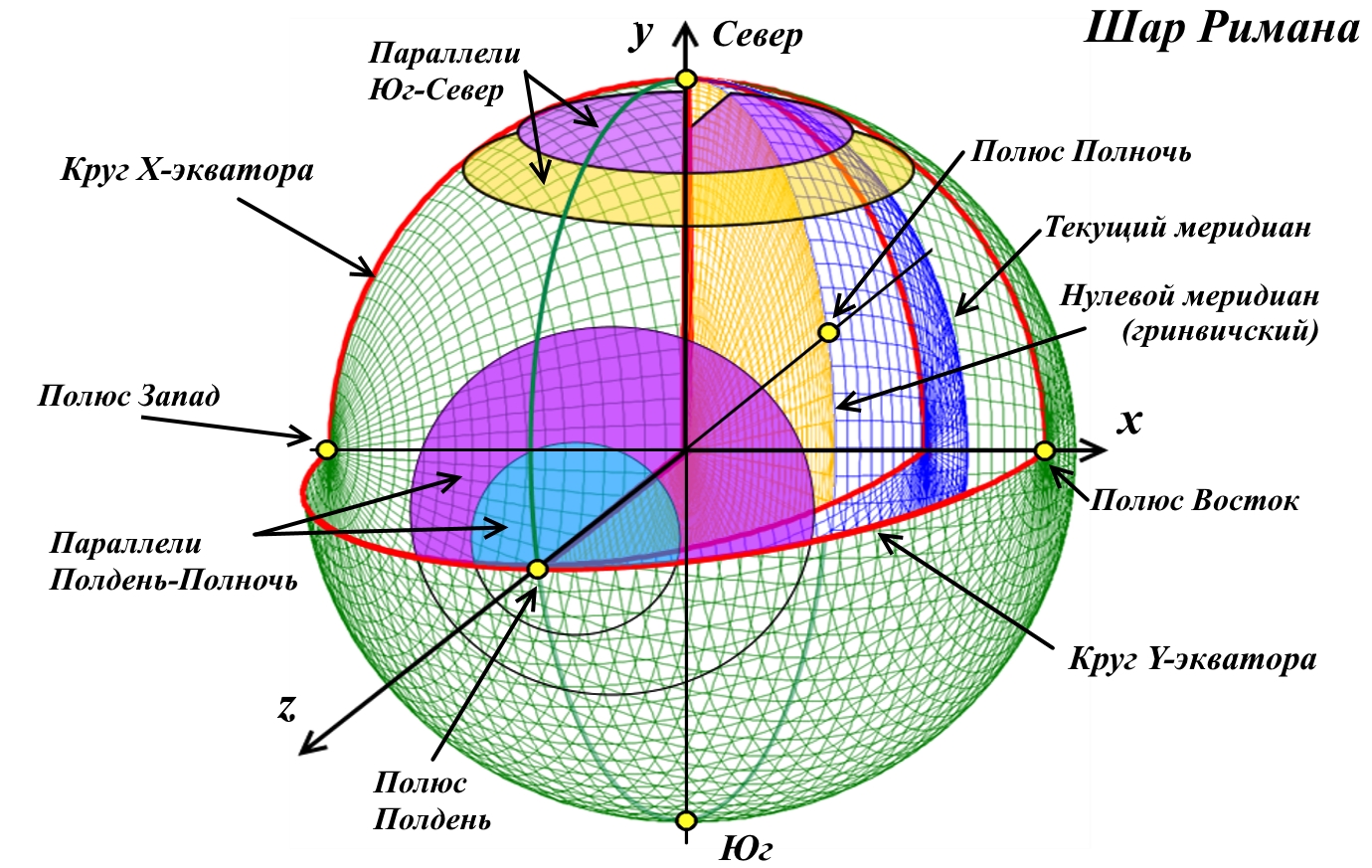
Рис.4.3. Система координат шара Римана. Слева параллели и экватор оси Z; справа параллели и экватор оси Y
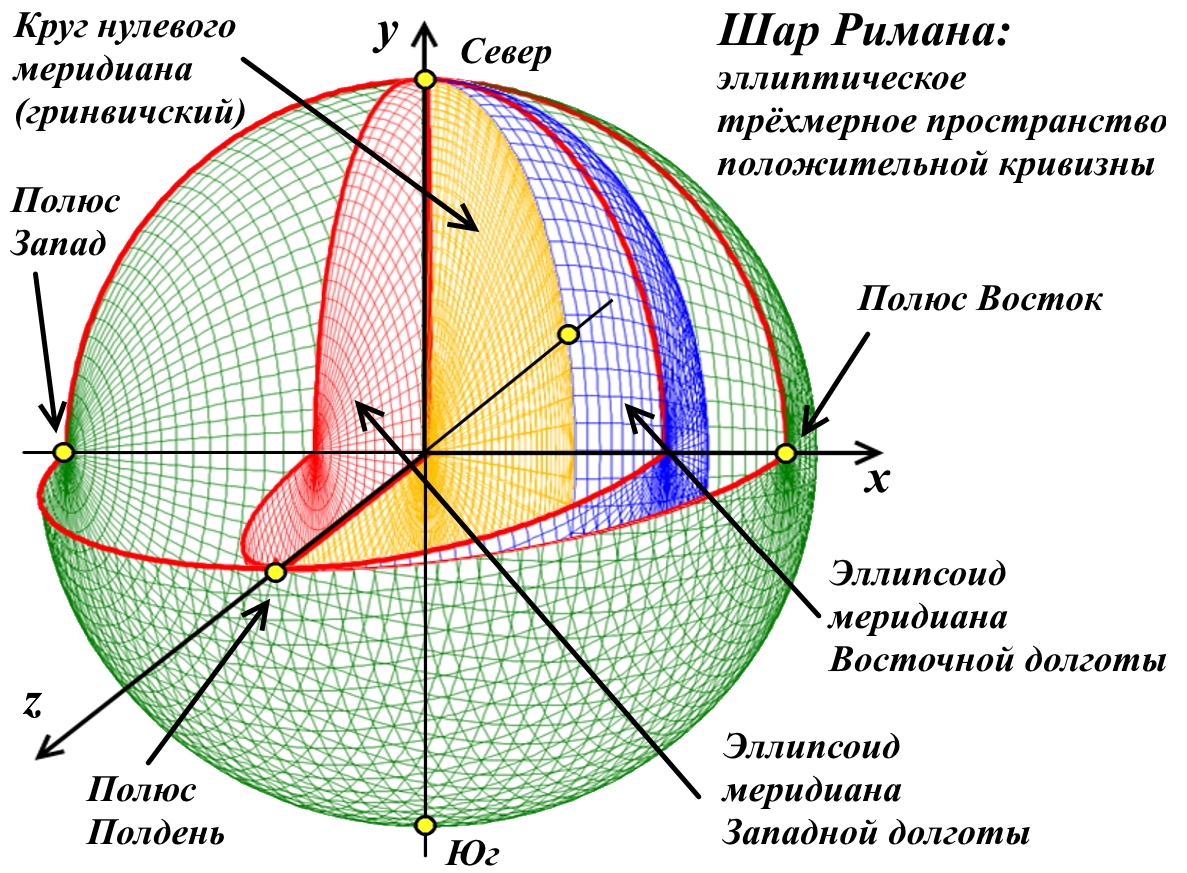
Рис.4.4. Система координат шара Римана: меридианы.
![]()
![]()